The Random Positioning Machine (RPM) or, by
some referred to as the 3-D clinostat, is a microweight ('microgravity') simulator
that is based on the principle of 'gravity-vector-averaging'. The
system may be compared with a classic 2D clinostat although such a clinostat
has only a two dimensional averaging of the g vector while the RPM provides
a functional volume which is 'exposed' to simulated microweight.
Gravity is a vector, i.e. it has a magnitude and a direction. During
an experiment run in this two axis RPM the sample's position with regard to
the Earth's gravity vector direction is constantly changing. The sample may
experience this as a zero-gravity environment.
As an example we may look at the gravity sensing system
of a plant. In the plant there are gravity sensing cells, statocytes, in the
stem and the root caps. These statocytes contain heavy particles, amyloplasts,
which settle to the lower part of a statocyte under normal 1×g Earth gravity
conditions. Without going into more detail, the position of these amyloplasts
within the statocyte provides the plant the information it needs to determine
the direction of the g-vector. However, these amyloplasts need some time to
settle within the cell. When we turn the plant upside down the amyloplasts will
settle to the 'top' of the cell. When we would constantly change the direction
of the plants with respect to the gravity vector the amyloplasts would never
be able to settle. You might say that they are drifting around within the volume
of the cell boundaries. Using the RPM we can set the required velocity to prevent
the particles from settling. These times / velocities are likely to be different
for different systems and have to be determined experimentally.
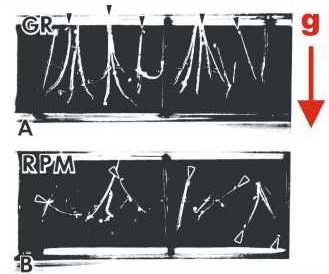
Arabidopsis seedlings
grown at 1×g (GR) or in the RPM (RPM). Notice the rather straight
growth at 1×g compared to the disoriented growth in the RPM.
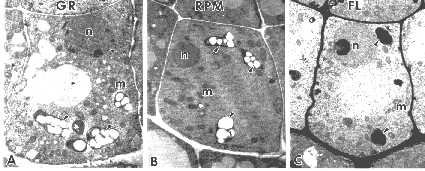
EM micrograph of
Arabidopsis columella cells grown at 1×g (GR), in the RPM (RPM)
or in the Space Shuttle (FL). Notice the similarity in the location
of the amyloplasts (m) within the cell. From Kraft
et al. Planta. 211(3), 415-422, 2000.
When needed the RPM could also be programmed to generate
partial gravity accelerations (~0.1 - 0.9 × g). The system may also be
operated in centrifuge mode, 'classic clinostat' mode, random mode or, since
the implementation of the new software, may generate particular reproduceble
paths that are generated within the software and executed during the actual
experiment.
The core of the full size Random Positioning Machine (RPM)
build by Dutch Space (former Fokker Space).
To accommodate various experiments
there are two versions or sizes of the machine. The larger of the two (see
picture above) is capable to accommodate larger experiments or instruments
like microscopes that are needed to monitor or support the actual sample
in the center. The smaller 'desktop' version is better suited to accommodate
more standardized cell biological or tissue culture experiments using multiwell
plates, T25/T75 flasks or the like. While the full size version is accommodated
in a dedicated temperature controlled incubator capable of supplying a 5%
CO2/air mixture, the desktop RPM can be placed in any regular laboratory
incubator and can easily be shiped to another lab for pilot experiments.
The core of the desktop RPM. The footprint of the
system is 30×30 cm.
The principle of an RPM is to
(randomly) rotate. As with other rotating systems this will generate an
acceleration. Since we want to simulate microgravity we are to avoid any
additional g forces. The level of simulation within this RPM depends very
much on the speed of rotation and the distance of the sample to the center
of rotation. In priciple only the exact center of the RPM i.e. the
center of rotation provides you the ultimate microgravity simulation. To
have a particular level of microgravity simulation you might use the graph
as shown here. In this figure a logarithmic scale of speed of rotation w
(in rad/s or degr/s) and distance of the sample from the center of rotation
(in cm) is depicted. You can see, for example, that when I would place a
sample 1 cm off center I need to set the angular velocity to 1 rad/s (or
about 57°/s) to have a maximum microgravity simulation level lower than
10-3g. The simulation level decreases when moving closer to the
center of rotaion at the same speed.
For standard experiments it is
preferred to use standard lab disposables as experiment container. When
more sophisticated tasks need to be performed that cannot be adopted to
standard lab plastics it is possible to use more flight like experiment
containers such as LIDIAs or
plunger boxes.
Future experiments on the RPM could make use of developments that have taken
place within the Technology Development Program at ESA/ESTEC. Various hardware
items for gravitation biology, such as small microscopes, video cameras,
cell / tissue / plant culture modules, insect modules etc., have been developed.
These modules might be used on the Random Positioning Machine to investigate
how biological systems will respond to simulated microgravity. See the ESA
web site for detailed information on these items, or
contact us for their use on the RPM (or the FFM
/ MidiCAR centrifuge).
All facilities mentioned are open
to perform your individual, dedicated, experiments or for collaborative studies.
When you are interested to
perform a series of (pilot) studies using the RPM you are invited to contact
us and discuss various possibilities. You may also directly send an experiment
proposal either to DESC or respond to one of the international 'Announcements
of Opportunities' (AO) as are in general annually issued by the European
Space Agency (ESA) or other space agencies. You may also apply via an unsolicited
proposal to ESA via the 'fast
track' Continuously Open Research Announcements. You may contact us when
you need any support for this. Dutch scientists may also apply nationally via
a NSO-NWO
proposal. An additional copy of the proposal has to be provided to DESC
for technical and operational evaluations.
The RPM is accommodated
in a temperature-controlled incubator ranging from +4 to +40°C.
Possibility to supply
a 5% CO2/air gas mixture inside the incubator.
PC user interface with
dedicated control software.
Operational modes: random
(0.1-2 rad/sec), centrifuge (0.1-20 rpm) and clinostat (0.1-20 rpm)
and freely programmable mode
Experiment interfaces:
Switchable 12/15 Volt
power line
RS232 (422) data bus
(optical)
Fiber optic video connection
and camera
Control experiment with
same interfaces are placed in same environment
Maximum experiment mass
to be accommodated 10 kg.
Functional experiment
accommodation volume 450 × 450 × 300 mm
Desktop Random Positioning
Machine
The desktop RPM (size
30×30×30 cm) can be accommodated in a standard incubator.
PC user interface with
dedicated control software.
Various operational modes:
random (0.1-2 rad/sec), centrifuge (~0.1-90 rpm) and clinostat (~0.1-90
rpm) and freely programmable mode or programmable path.
Experiment interfaces:
12 channel slipring.
Maximum experiment mass
to be accommodated 1.5 kg.
Functional experiment
accommodation volume 150 × 150 × 150 mm
RPM
'live' in EK-08
(Live data pictures / video
of an RPM experiment run are only made available at remote sites when necessary
for a particular PI.)
References on RPM
or 3-D clinostats
General
The Random Positioning
Machine is based on the hypothesis of Dr. D. Mesland (see ESA
Publication) and built by Dutch Space (former Fokker Space), Leiden, The Netherlands.
Dr.
Huijser from Dutch Space (former Fokker Space) wrote a paper discribing the
desktop RPM (download
PDF version).
Plants
Plastid
position in Arabidopsis columella cells is similar in microgravity and on
a random-positioning machine. Kraft Tristan F. B. , Jack J. W. A. van Loon,
John Z. Kiss. Planta. 211(3), 415-422, 2000. You may download
a pdf version this paper by Kraft et al.
Simulated weightlessness
and hyper-g results in opposite effects on the regeneration of the cortical
microtubule array in protoplasts from Brassica napus hypocotyls. Skagen EB,
Iversen TH. Physiol Plant 1999 Jul;106(3):318-25.
Automorphosis of higher
plants on a 3-D clinostat. Hoson T, Kamisaka S, Yamashita M, Masuda Y. Adv
Space Res. 1998;21(8-9):1229-38.
Evaluation of the three-dimensional
clinostat as a simulator of weightlessness. Hoson T, Kamisaka S, Masuda Y,
Yamashita M, Buchen B. Planta. 1997;203 Suppl:S187-97.
Morphogenesis and cell
wall changes in maize shoots under simulated microgravity conditions. Hoson
T, Kamisaka S, Yamashita M, Masuda Y. Biol Sci Space 1995 Dec;9(4):337-44.
Effect of simulated microgravity
on auxin polar transport in inflorescence axis of Arabidopsis thaliana. Oka
M, Ueda J, Miyamoto K, Yamamoto R, Hoson T, Kamisaka S. Biol Sci Space 1995
Dec;9(4):331-6.
The senescence of oat
leaf segments is promoted under simulated microgravity condition on a three-dimensional
clinostat. Miyamoto K, Oka M, Ueda J, Hoson T, Kamisaka S. Biol Sci Space
1995 Dec;9(4):327-30.
Changes in the rheological
properties of the cell wall of plant seedlings under simulated microgravity
conditions. Masuda Y, Kamisaka S, Yamamoto R, Hoson T, Nishinari K. Biorheology
1994 Mar-Apr;31(2):171-7.
Vegetative growth of
higher plants on a three-dimensional clinostat. Hoson T, Kamisaka S, Miyamoto
K, Ueda J, Yamashita M, Masuda Y. Microgravity Sci Technol. 1993 Dec;6(4):278-81.
Mammalian cells / tissues
Steven J. Pardo, Mamta
J. Patel, Michelle C. Sykes, Manu O. Platt, Nolan L. Boyd, George P. Sorescu,
Min Xu, Jack J. W. A. van Loon, May D. Wang and Hanjoong Jo. Simulated microgravity
using the Random Positioning Machine inhibits differentiation and alters gene
expression profiles of 2T3 preosteoblasts. Am J Physiol Cell Physiol. 288:1211-1221,
2005. Download
full pdf version (430 kb).
Response of cultured
fetal mouse long bones to random positioning. J. Paul Veldhuijzen, Jolanda
M.A. de Blieck-Hogervorst and Jack J.W.A. van Loon. ASGSB 2001 Annual Meeting
Abstracts.
Culture in 3D-clinostat
inhibitsTGF-beta, p38 MAPK in differentiation of human osteoblasts. L.Yuge,
Y. Kumei, M. Kanno, Y. Ikuta, K.Kataoka, H.Kajihara. ASGSB 2001 Annual Meeting
Abstracts.
Stress-compensation by
a food supplement based on yeast plasmolysate in mitogen-activated T lymphocytes
under simulated low-gravity. Schwarzenberg M, Joller P, Cogoli A. Biol Sci
Space 2000 Mar;14(1):3-8.
Human immune cells as
space travelers. Walther I, Cogoli A, Pippia P, Meloni MA, Cossu G, Cogoli
M, Schwarzenberg M, Turrini F, Mannu F. Eur J Med Res 1999 Sep 9;4(9):361-3.
Experiment on mammalian
cells are conducted by Schwartzenberg et al.: 'Signal transduction
in T lymphocytes - A comparison of the data from space, the free fall machine
and the random positioning machine' in Adv. Space Res. 24, 793-800, 1999.
Signal transduction in
T lymphocytes--a comparison of the data from space, the free fall machine
and the random positioning machine. Schwarzenberg M, Pippia P, Meloni MA,
Cossu G, Cogoli-Greuter M, Cogoli A. Adv Space Res 1999;24(6):793-800
Microgravity simulations
with human lymphocytes in the free fall machine and in the random positioning
machine. Schwarzenberg M, Pippia P, Meloni MA, Cossu G, Cogoli-Greuter M,
Cogoli A. J Gravit Physiol 1998 Jul;5(1):P23-6.
Simulated microgravity
inhibits the genetic expression of interleukin-2 and its receptor in mitogen-activated
T lymphocytes. Walther I, Pippia P, Meloni MA, Turrini F, Mannu F, Cogoli
A. FEBS Lett 1998 Sep 25;436(1):115-8.